Home
(1)串口能够输出调试信息。
(2)OLED可以在飞控PCB上显示实时参数。
(3)单片机可以读取GY-86传感器数据。
(4)单片机可以控制电机以不同转速转动。
(5)单片机可以捕获接收机信号。
(1)OLED和串口可以同步输出各项参数。
(2)将GY-86实时数据作为调试信息输出。
(3)根据接收机信号来调整电机转速。
(1)系统初始化。
(2)基础外设初始化。
(3)硬件模块初始化。
a.调试信息输出设备初始化。
b.电机初始化。
c.传感器初始化。
d.电机自动校准。
e.接收机初始化。
f.参数显示界面绘制。
(4)后台程序:参数输出。
(5)前台程序:串口中断、TIM中断。
机械部分(略): 机架、电机、电调、电池。
飞控部分:
-
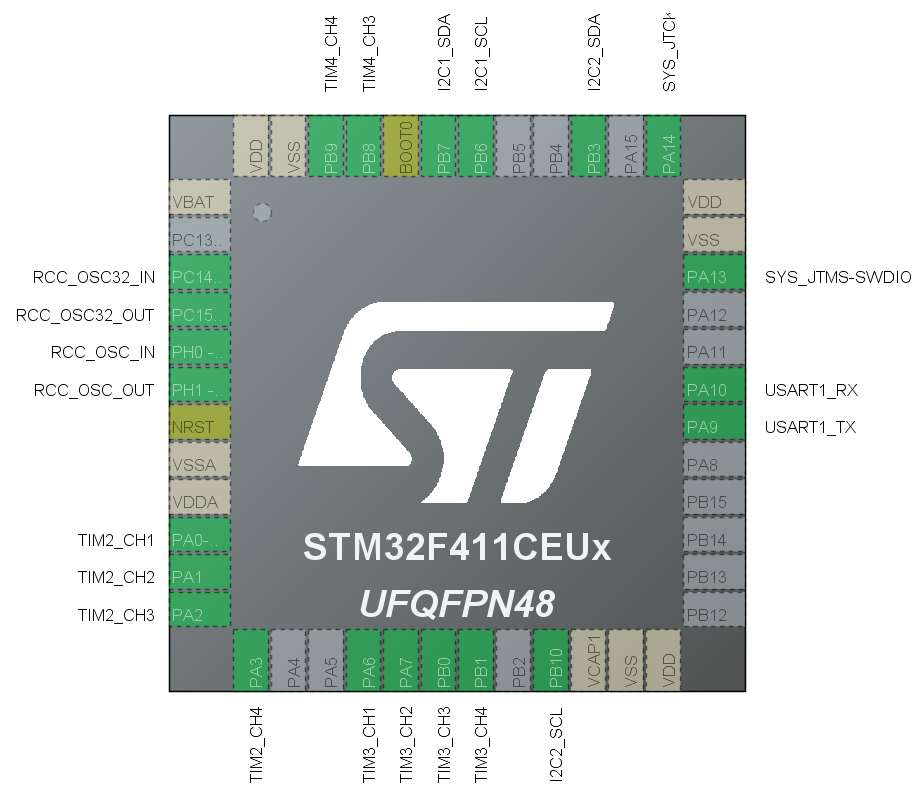
主控芯片:STM32F411CEU6
板型:最小系统板。裁剪多余模块,仅留下供系统运行的最小系统,体积小,自定义潜力大。
优点:Cortex-M4、128K SRAM、512K Flash、100MHz主频、以及丰富的外设接口和较小的体积。
方便在进一步迭代中运行操作系统,以及添加红外测距、WiFi图传等外设。
-
上位机通讯:WIFI-ESP8266
优点:数据传输距离远、速度快,可以接入互联网。
在进一步迭代中方便飞控实现长距离、大数据量上位机传输任务,实现远程OTA固件更新、远程PID参数一键调整,同时还可扩展为WIFI图传、串口接收机、一旦接入互联网即可实现真正意义上的远距离控制等丰富功能。
-
板载参数显示:0.96存I2C OLED小屏幕
优点:方便在飞控上直接获取实时数据,即便不连接上位机也可以初步了解飞控运行情况。
-
姿态传感器:GY-86
优点:麻雀虽小,五脏俱全。
-
接收机:FS-IA10B
优点:提供10通道数据传输,可以实现更多自定义功能。
-
遥控器:Jumper T18
优点:兼容性以及自定义程度最高的Open TX开源操作系统。
借助CubeMX快速规划。
如图所示:
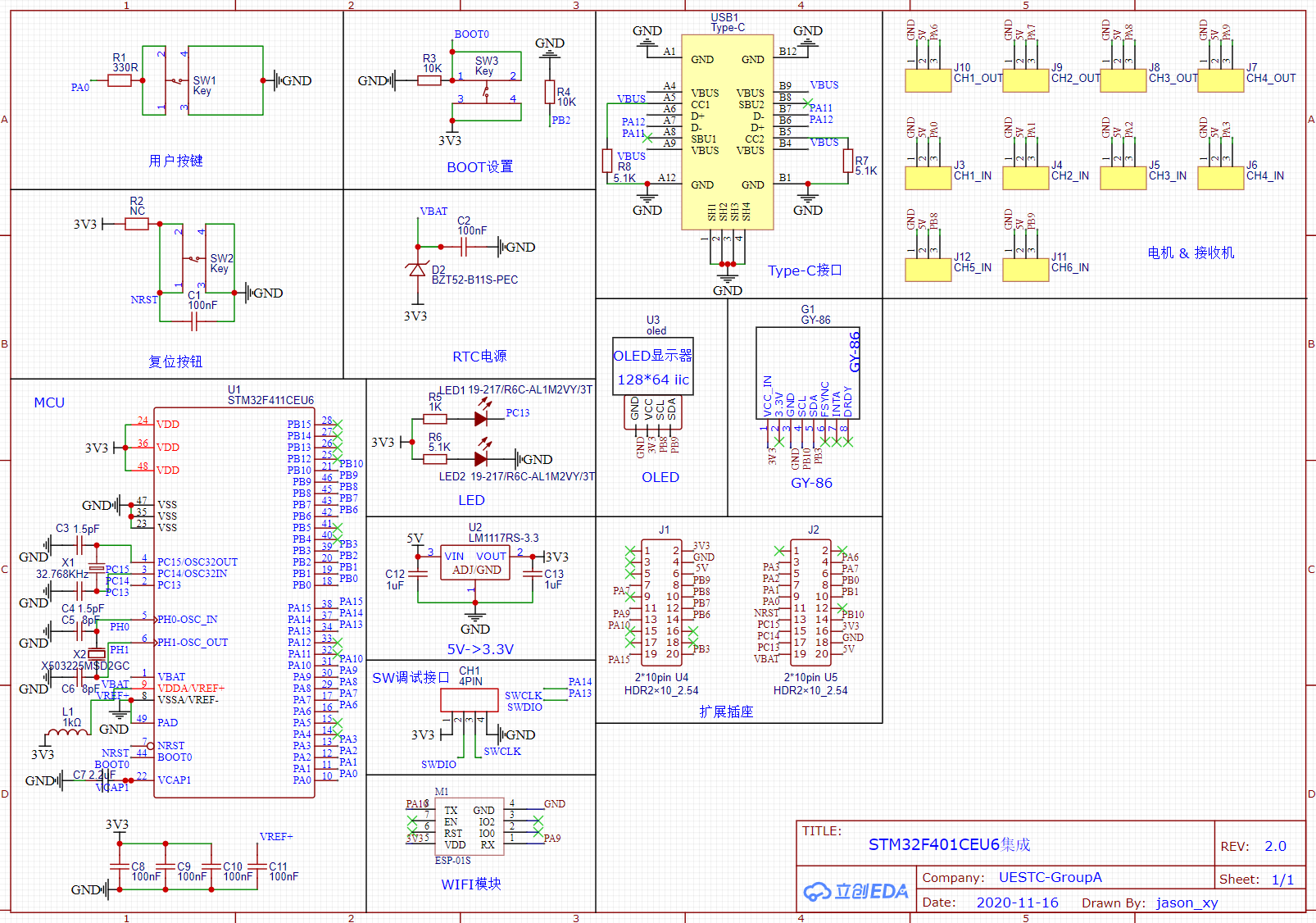
原理图绘制(扩展板)

根据CubeMX生成引脚号进行连线即可。
可以考虑预留调试接口和其他外设的电源接口。
PCB绘制
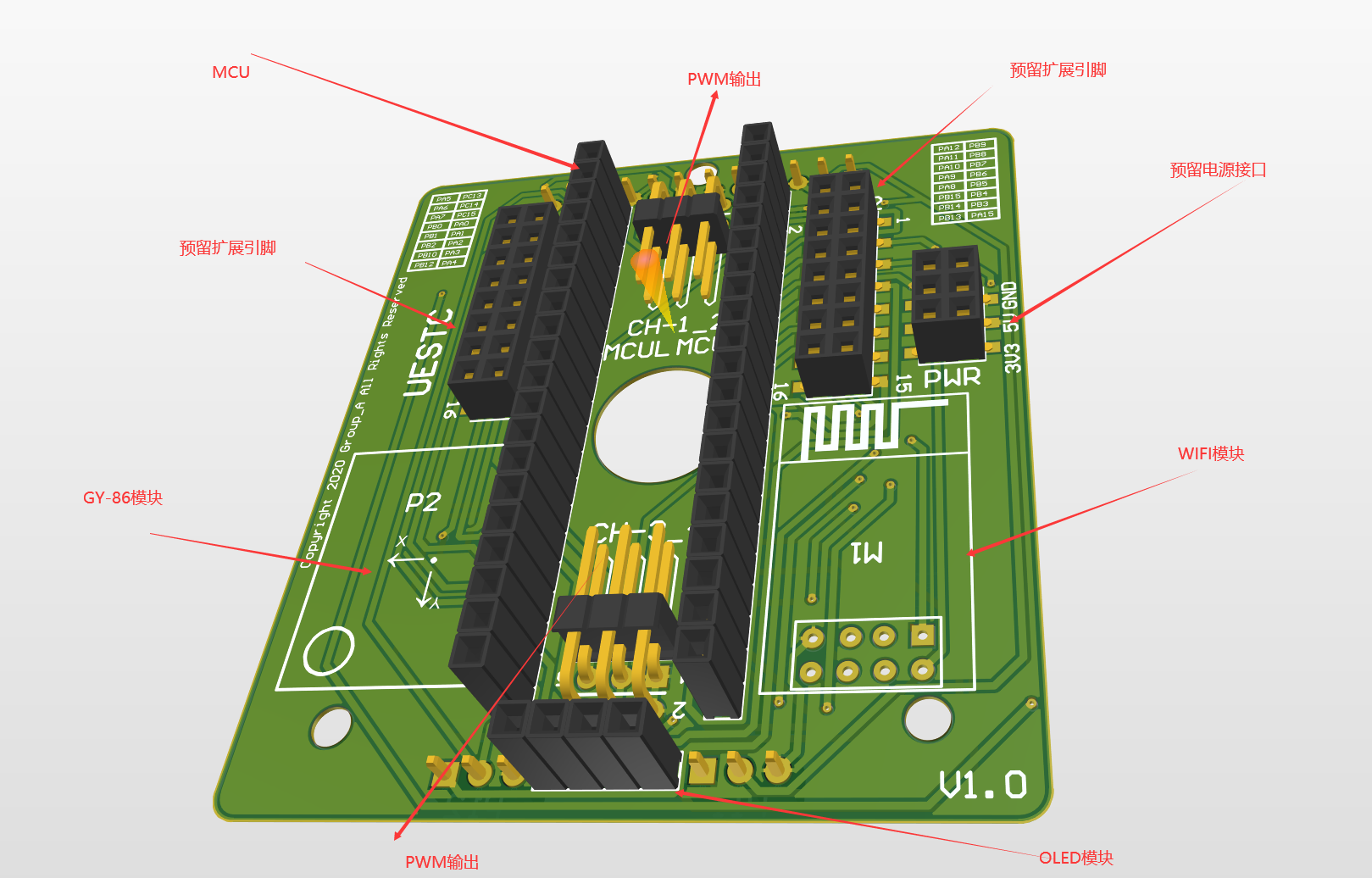
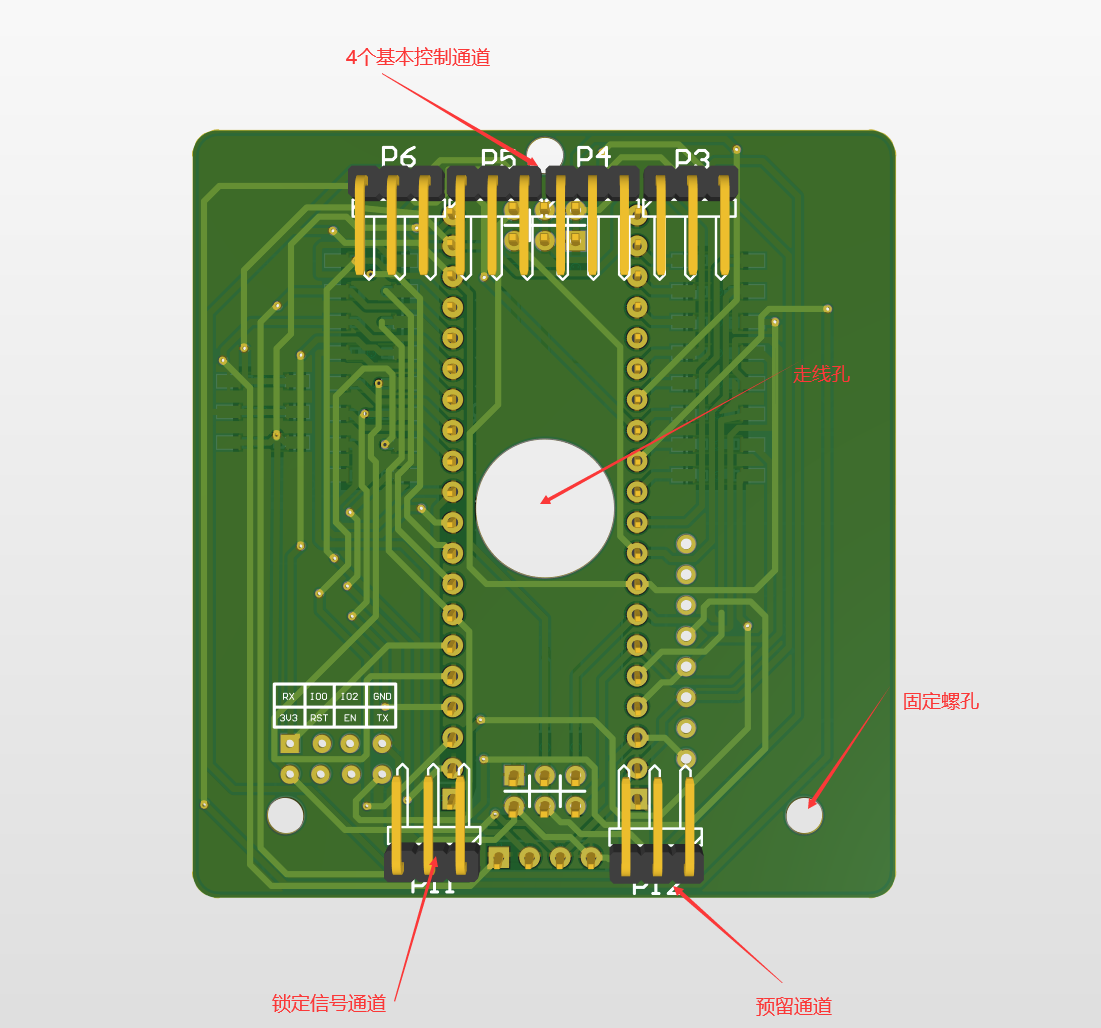
注意:
1.布局安排。
2.封装选择。
3.器件方向。
4.特殊网络规则。
原理图绘制(一体化半成品)
优点:效率高、逻辑性强、资料多、可移植性强。
缺点:复杂的代码量、极慢的编译速度、略微低下的效率、屏蔽硬件差异,需要挖掘库函数源码才能了解底层运作。
C:.
│ F411CEU6_V1.ioc
│ tree.txt
│
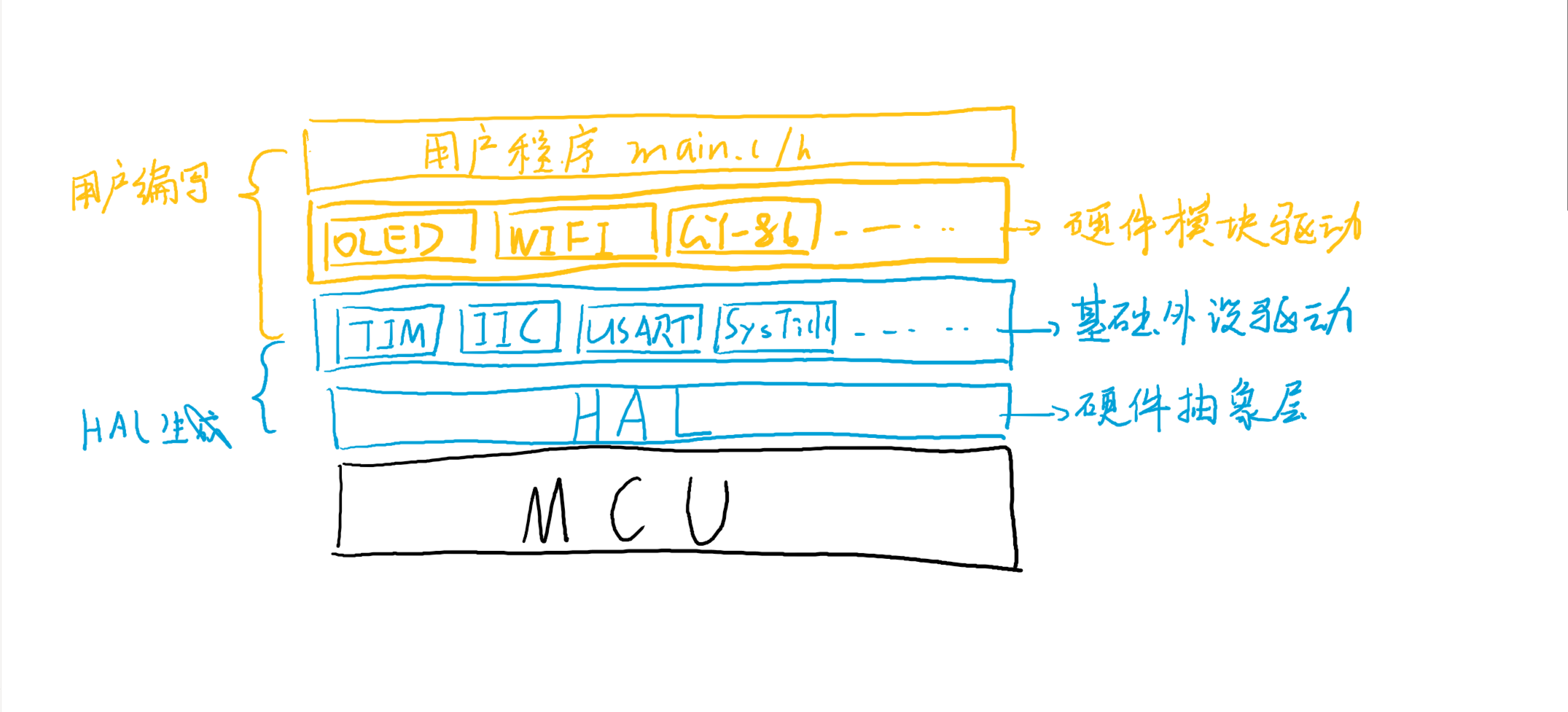
├─Core #用户代码
│ ├─Inc
│ │ gpio.h
│ │ i2c.h
│ │ main.h
│ │ stm32f4xx_hal_conf.h
│ │ stm32f4xx_it.h
│ │ tim.h
│ │ usart.h
│ │
│ └─Src
│ gpio.c
│ i2c.c
│ main.c
│ stm32f4xx_hal_msp.c
│ stm32f4xx_it.c
│ system_stm32f4xx.c
│ tim.c
│ usart.c
│
├─Drivers
│ |—CMSIS...... #硬件抽象层
│ ├─HW #外部硬件模块驱动
│ │ ├─inc
│ │ │ controller.h
│ │ │ esp8266.h
│ │ │ hmc5883l.h
│ │ │ motor.h
│ │ │ mpu6050.h
│ │ │ oled.h
│ │ │ oledfont.h
│ │ │
│ │ └─src
│ │ controller.c
│ │ esp8266.c
│ │ hmc5883l.c
│ │ motor.c
│ │ mpu6050.c
│ │ oled.c
│ │
│ └─STM32F4xx_HAL_Driver #HAL库文件
│ ├─Inc
│ │ │ stm32f4xx_hal.h
│ │ │ stm32f4xx_hal_adc.h
│ │ │ stm32f4xx_hal_adc_ex.h
│ │ │ stm32f4xx_hal_can.h
│ │ │ stm32f4xx_hal_cec.h
│ │ │ stm32f4xx_hal_conf_template.h
│ │ │ stm32f4xx_hal_cortex.h
│ │ │ stm32f4xx_hal_crc.h
│ │ │ stm32f4xx_hal_cryp.h
│ │ │ stm32f4xx_hal_cryp_ex.h
│ │ │ stm32f4xx_hal_dac.h
│ │ │ stm32f4xx_hal_dac_ex.h
│ │ │ stm32f4xx_hal_dcmi.h
│ │ │ stm32f4xx_hal_dcmi_ex.h
│ │ │ stm32f4xx_hal_def.h
│ │ │ stm32f4xx_hal_dfsdm.h
│ │ │ stm32f4xx_hal_dma.h
│ │ │ stm32f4xx_hal_dma2d.h
│ │ │ stm32f4xx_hal_dma_ex.h
│ │ │ stm32f4xx_hal_dsi.h
│ │ │ stm32f4xx_hal_eth.h
│ │ │ stm32f4xx_hal_exti.h
│ │ │ stm32f4xx_hal_flash.h
│ │ │ stm32f4xx_hal_flash_ex.h
│ │ │ stm32f4xx_hal_flash_ramfunc.h
│ │ │ stm32f4xx_hal_fmpi2c.h
│ │ │ stm32f4xx_hal_fmpi2c_ex.h
│ │ │ stm32f4xx_hal_fmpsmbus.h
│ │ │ stm32f4xx_hal_gpio.h
│ │ │ stm32f4xx_hal_gpio_ex.h
│ │ │ stm32f4xx_hal_hash.h
│ │ │ stm32f4xx_hal_hash_ex.h
│ │ │ stm32f4xx_hal_hcd.h
│ │ │ stm32f4xx_hal_i2c.h
│ │ │ stm32f4xx_hal_i2c_ex.h
│ │ │ stm32f4xx_hal_i2s.h
│ │ │ stm32f4xx_hal_i2s_ex.h
│ │ │ stm32f4xx_hal_irda.h
│ │ │ stm32f4xx_hal_iwdg.h
│ │ │ stm32f4xx_hal_lptim.h
│ │ │ stm32f4xx_hal_ltdc.h
│ │ │ stm32f4xx_hal_ltdc_ex.h
│ │ │ stm32f4xx_hal_mmc.h
│ │ │ stm32f4xx_hal_nand.h
│ │ │ stm32f4xx_hal_nor.h
│ │ │ stm32f4xx_hal_pccard.h
│ │ │ stm32f4xx_hal_pcd.h
│ │ │ stm32f4xx_hal_pcd_ex.h
│ │ │ stm32f4xx_hal_pwr.h
│ │ │ stm32f4xx_hal_pwr_ex.h
│ │ │ stm32f4xx_hal_qspi.h
│ │ │ stm32f4xx_hal_rcc.h
│ │ │ stm32f4xx_hal_rcc_ex.h
│ │ │ stm32f4xx_hal_rng.h
│ │ │ stm32f4xx_hal_rtc.h
│ │ │ stm32f4xx_hal_rtc_ex.h
│ │ │ stm32f4xx_hal_sai.h
│ │ │ stm32f4xx_hal_sai_ex.h
│ │ │ stm32f4xx_hal_sd.h
│ │ │ stm32f4xx_hal_sdram.h
│ │ │ stm32f4xx_hal_smartcard.h
│ │ │ stm32f4xx_hal_smbus.h
│ │ │ stm32f4xx_hal_spdifrx.h
│ │ │ stm32f4xx_hal_spi.h
│ │ │ stm32f4xx_hal_sram.h
│ │ │ stm32f4xx_hal_tim.h
│ │ │ stm32f4xx_hal_tim_ex.h
│ │ │ stm32f4xx_hal_uart.h
│ │ │ stm32f4xx_hal_usart.h
│ │ │ stm32f4xx_hal_wwdg.h
│ │ │ stm32f4xx_ll_adc.h
│ │ │ stm32f4xx_ll_bus.h
│ │ │ stm32f4xx_ll_cortex.h
│ │ │ stm32f4xx_ll_crc.h
│ │ │ stm32f4xx_ll_dac.h
│ │ │ stm32f4xx_ll_dma.h
│ │ │ stm32f4xx_ll_dma2d.h
│ │ │ stm32f4xx_ll_exti.h
│ │ │ stm32f4xx_ll_fmc.h
│ │ │ stm32f4xx_ll_fmpi2c.h
│ │ │ stm32f4xx_ll_fsmc.h
│ │ │ stm32f4xx_ll_gpio.h
│ │ │ stm32f4xx_ll_i2c.h
│ │ │ stm32f4xx_ll_iwdg.h
│ │ │ stm32f4xx_ll_lptim.h
│ │ │ stm32f4xx_ll_pwr.h
│ │ │ stm32f4xx_ll_rcc.h
│ │ │ stm32f4xx_ll_rng.h
│ │ │ stm32f4xx_ll_rtc.h
│ │ │ stm32f4xx_ll_sdmmc.h
│ │ │ stm32f4xx_ll_spi.h
│ │ │ stm32f4xx_ll_system.h
│ │ │ stm32f4xx_ll_tim.h
│ │ │ stm32f4xx_ll_usart.h
│ │ │ stm32f4xx_ll_usb.h
│ │ │ stm32f4xx_ll_utils.h
│ │ │ stm32f4xx_ll_wwdg.h
│ │ │ stm32_assert_template.h
│ │ │
│ │ └─Legacy
│ │ stm32f4xx_hal_can_legacy.h
│ │ stm32_hal_legacy.h
│ │
│ └─Src
│ stm32f4xx_hal.c
│ stm32f4xx_hal_adc.c
│ stm32f4xx_hal_adc_ex.c
│ stm32f4xx_hal_can.c
│ stm32f4xx_hal_cec.c
│ stm32f4xx_hal_cortex.c
│ stm32f4xx_hal_crc.c
│ stm32f4xx_hal_cryp.c
│ stm32f4xx_hal_cryp_ex.c
│ stm32f4xx_hal_dac.c
│ stm32f4xx_hal_dac_ex.c
│ stm32f4xx_hal_dcmi.c
│ stm32f4xx_hal_dcmi_ex.c
│ stm32f4xx_hal_dfsdm.c
│ stm32f4xx_hal_dma.c
│ stm32f4xx_hal_dma2d.c
│ stm32f4xx_hal_dma_ex.c
│ stm32f4xx_hal_dsi.c
│ stm32f4xx_hal_eth.c
│ stm32f4xx_hal_exti.c
│ stm32f4xx_hal_flash.c
│ stm32f4xx_hal_flash_ex.c
│ stm32f4xx_hal_flash_ramfunc.c
│ stm32f4xx_hal_fmpi2c.c
│ stm32f4xx_hal_fmpi2c_ex.c
│ stm32f4xx_hal_fmpsmbus.c
│ stm32f4xx_hal_gpio.c
│ stm32f4xx_hal_hash.c
│ stm32f4xx_hal_hash_ex.c
│ stm32f4xx_hal_hcd.c
│ stm32f4xx_hal_i2c.c
│ stm32f4xx_hal_i2c_ex.c
│ stm32f4xx_hal_i2s.c
│ stm32f4xx_hal_i2s_ex.c
│ stm32f4xx_hal_irda.c
│ stm32f4xx_hal_iwdg.c
│ stm32f4xx_hal_lptim.c
│ stm32f4xx_hal_ltdc.c
│ stm32f4xx_hal_ltdc_ex.c
│ stm32f4xx_hal_mmc.c
│ stm32f4xx_hal_msp_template.c
│ stm32f4xx_hal_nand.c
│ stm32f4xx_hal_nor.c
│ stm32f4xx_hal_pccard.c
│ stm32f4xx_hal_pcd.c
│ stm32f4xx_hal_pcd_ex.c
│ stm32f4xx_hal_pwr.c
│ stm32f4xx_hal_pwr_ex.c
│ stm32f4xx_hal_qspi.c
│ stm32f4xx_hal_rcc.c
│ stm32f4xx_hal_rcc_ex.c
│ stm32f4xx_hal_rng.c
│ stm32f4xx_hal_rtc.c
│ stm32f4xx_hal_rtc_ex.c
│ stm32f4xx_hal_sai.c
│ stm32f4xx_hal_sai_ex.c
│ stm32f4xx_hal_sd.c
│ stm32f4xx_hal_sdram.c
│ stm32f4xx_hal_smartcard.c
│ stm32f4xx_hal_smbus.c
│ stm32f4xx_hal_spdifrx.c
│ stm32f4xx_hal_spi.c
│ stm32f4xx_hal_sram.c
│ stm32f4xx_hal_tim.c
│ stm32f4xx_hal_timebase_rtc_alarm_template.c
│ stm32f4xx_hal_timebase_rtc_wakeup_template.c
│ stm32f4xx_hal_timebase_tim_template.c
│ stm32f4xx_hal_tim_ex.c
│ stm32f4xx_hal_uart.c
│ stm32f4xx_hal_usart.c
│ stm32f4xx_hal_wwdg.c
│ stm32f4xx_ll_adc.c
│ stm32f4xx_ll_crc.c
│ stm32f4xx_ll_dac.c
│ stm32f4xx_ll_dma.c
│ stm32f4xx_ll_dma2d.c
│ stm32f4xx_ll_exti.c
│ stm32f4xx_ll_fmc.c
│ stm32f4xx_ll_fmpi2c.c
│ stm32f4xx_ll_fsmc.c
│ stm32f4xx_ll_gpio.c
│ stm32f4xx_ll_i2c.c
│ stm32f4xx_ll_lptim.c
│ stm32f4xx_ll_pwr.c
│ stm32f4xx_ll_rcc.c
│ stm32f4xx_ll_rng.c
│ stm32f4xx_ll_rtc.c
│ stm32f4xx_ll_sdmmc.c
│ stm32f4xx_ll_spi.c
│ stm32f4xx_ll_tim.c
│ stm32f4xx_ll_usart.c
│ stm32f4xx_ll_usb.c
│ stm32f4xx_ll_utils.c
│
└─MDK-ARM
│ EventRecorderStub.scvd
│ F411CEU6_V1.uvguix.Jason
│ F411CEU6_V1.uvoptx
│ F411CEU6_V1.uvprojx
│ startup_stm32f411xe.lst
│ startup_stm32f411xe.s
│
├─DebugConfig
│ F411CEU6_V1_STM32F411CEUx.dbgconf
│
├─F411CEU6_V1
│ controller.crf
│ controller.d
│ controller.o
│ esp8266.crf
│ esp8266.d
│ esp8266.o
│ ExtDll.iex
│ F411CEU6_V1.axf
│ F411CEU6_V1.build_log.htm
│ F411CEU6_V1.hex
│ F411CEU6_V1.htm
│ F411CEU6_V1.lnp
│ F411CEU6_V1.map
│ F411CEU6_V1.sct
│ F411CEU6_V1_F411CEU6_V1.dep
│ gpio.crf
│ gpio.d
│ gpio.o
│ hmc5883l.crf
│ hmc5883l.d
│ hmc5883l.o
│ i2c.crf
│ i2c.d
│ i2c.o
│ main.crf
│ main.d
│ main.o
│ motor.crf
│ motor.d
│ motor.o
│ mpu6050.crf
│ mpu6050.d
│ mpu6050.o
│ oled.crf
│ oled.d
│ oled.o
│ startup_stm32f411xe.d
│ startup_stm32f411xe.o
│ stm32f4xx_hal.crf
│ stm32f4xx_hal.d
│ stm32f4xx_hal.o
│ stm32f4xx_hal_cortex.crf
│ stm32f4xx_hal_cortex.d
│ stm32f4xx_hal_cortex.o
│ stm32f4xx_hal_dma.crf
│ stm32f4xx_hal_dma.d
│ stm32f4xx_hal_dma.o
│ stm32f4xx_hal_dma_ex.crf
│ stm32f4xx_hal_dma_ex.d
│ stm32f4xx_hal_dma_ex.o
│ stm32f4xx_hal_exti.crf
│ stm32f4xx_hal_exti.d
│ stm32f4xx_hal_exti.o
│ stm32f4xx_hal_flash.crf
│ stm32f4xx_hal_flash.d
│ stm32f4xx_hal_flash.o
│ stm32f4xx_hal_flash_ex.crf
│ stm32f4xx_hal_flash_ex.d
│ stm32f4xx_hal_flash_ex.o
│ stm32f4xx_hal_flash_ramfunc.crf
│ stm32f4xx_hal_flash_ramfunc.d
│ stm32f4xx_hal_flash_ramfunc.o
│ stm32f4xx_hal_gpio.crf
│ stm32f4xx_hal_gpio.d
│ stm32f4xx_hal_gpio.o
│ stm32f4xx_hal_i2c.crf
│ stm32f4xx_hal_i2c.d
│ stm32f4xx_hal_i2c.o
│ stm32f4xx_hal_i2c_ex.crf
│ stm32f4xx_hal_i2c_ex.d
│ stm32f4xx_hal_i2c_ex.o
│ stm32f4xx_hal_msp.crf
│ stm32f4xx_hal_msp.d
│ stm32f4xx_hal_msp.o
│ stm32f4xx_hal_pwr.crf
│ stm32f4xx_hal_pwr.d
│ stm32f4xx_hal_pwr.o
│ stm32f4xx_hal_pwr_ex.crf
│ stm32f4xx_hal_pwr_ex.d
│ stm32f4xx_hal_pwr_ex.o
│ stm32f4xx_hal_rcc.crf
│ stm32f4xx_hal_rcc.d
│ stm32f4xx_hal_rcc.o
│ stm32f4xx_hal_rcc_ex.crf
│ stm32f4xx_hal_rcc_ex.d
│ stm32f4xx_hal_rcc_ex.o
│ stm32f4xx_hal_tim.crf
│ stm32f4xx_hal_tim.d
│ stm32f4xx_hal_tim.o
│ stm32f4xx_hal_tim_ex.crf
│ stm32f4xx_hal_tim_ex.d
│ stm32f4xx_hal_tim_ex.o
│ stm32f4xx_hal_uart.crf
│ stm32f4xx_hal_uart.d
│ stm32f4xx_hal_uart.o
│ stm32f4xx_it.crf
│ stm32f4xx_it.d
│ stm32f4xx_it.o
│ system_stm32f4xx.crf
│ system_stm32f4xx.d
│ system_stm32f4xx.o
│ tim.crf
│ tim.d
│ tim.o
│ usart.crf
│ usart.d
│ usart.o
│
└─RTE
└─_F411CEU6_V1
RTE_Components.h文件类型详解参考资料:Keil 项目/生成的各种文件类型(.AXF、.D、.crf、.exf)说明
主函数: main.c/.h
MSP初始化: stm32f2xx_hal_msp_template.c ......
中断服务函数: stm32f2xx_it.c/.h
硬件模块驱动: mpu6050.c/.h ......
HAL 库对底层进行了抽象,在此结构下,用户代码处理可分为三大部分:
- 句柄
- MSP
- 回调函数
在STM32的标准库中,假设我们要初始化一个外设(这里以USART为例) 我们首先要初始化他们的各个寄存器。在标准库中,这些操作都是利用固件库结构体变量+固件库Init函数实现的:
USART_InitTypeDef USART_InitStructure;
USART_InitStructure.USART_BaudRate = bound;//串口波特率
USART_InitStructure.USART_WordLength = USART_WordLength_8b;//字长为8位数据格式
USART_InitStructure.USART_StopBits = USART_StopBits_1;//一个停止位
USART_InitStructure.USART_Parity = USART_Parity_No;//无奇偶校验位
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;//无硬件数据流控制
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx; //收发模式
USART_Init(USART3, &USART_InitStructure); //初始化串口1可以看到,要初始化一个串口,需要对六个位置进行赋值,然后引用Init函数,并且USART_InitStructure并不是一个全局结构体变量,而是只在函数内部的局部变量,初始化完成之后,USART_InitStructure就失去了作用。
而在HAL库中,同样是USART初始化结构体变量,我们要定义为全局变量。
UART_HandleTypeDef UART1_Handler; //串口处理结构体相关结构体成员:
typedef struct
{
USART_TypeDef *Instance; /*!< UART registers base address */
UART_InitTypeDef Init; /*!< UART communication parameters */
uint8_t *pTxBuffPtr; /*!< Pointer to UART Tx transfer Buffer */
uint16_t TxXferSize; /*!< UART Tx Transfer size */
uint16_t TxXferCount; /*!< UART Tx Transfer Counter */
uint8_t *pRxBuffPtr; /*!< Pointer to UART Rx transfer Buffer */
uint16_t RxXferSize; /*!< UART Rx Transfer size */
uint16_t RxXferCount; /*!< UART Rx Transfer Counter */
DMA_HandleTypeDef *hdmatx; /*!< UART Tx DMA Handle parameters */
DMA_HandleTypeDef *hdmarx; /*!< UART Rx DMA Handle parameters */
HAL_LockTypeDef Lock; /*!< Locking object */
__IO HAL_UART_StateTypeDef State; /*!< UART communication state */
__IO uint32_t ErrorCode; /*!< UART Error code */
}UART_HandleTypeDef;我们发现,与标准库不同的是,该成员不仅包含了之前标准库就有的六个成员(波特率,数据格式等),还包含过采样、(发送或接收的)数据缓存、数据指针、串口 DMA 相关的变量、各种标志位等等要在整个项目流程中都要设置的各个成员。
该 UART1_Handler 就被称为串口的句柄 它被贯穿整个USART收发的流程,比如开启中断:
uint8_t HAL_UART_Receive_IT(&UART1_Handler, (u8 *)aRxBuffer, RXBUFFERSIZE);比如后面要讲到的MSP与Callback回调函数:
void HAL_UART_MspInit(UART_HandleTypeDef *huart);
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart);在这些函数中,只需要调用初始化时定义的句柄UART1_Handler就好。
MCU Specific Package 单片机的具体方案
MSP是指和MCU相关的初始化: 1.一部分是与MCU无关的,协议层。 2.一部分是与MCU相关的,物理层。
举个例子:
我们要初始化一个串口,首先要设置和 MCU 无关的东西,例如波特率,奇偶校验,停止位等,这些参数设置和 MCU 没有任何关系,可以使用 STM32F1,也可以是 STM32F2/F3/F4/F7上的串口。
而一个串口设备它需要一个 MCU 来承载,例如用 STM32F4 来做承载,PA9 做为发送,PA10 做为接收,MSP 就是要初始化 STM32F4 的 PA9,PA10,配置这两个引脚。所以 HAL驱动方式的初始化流程就是:HAL_USART_Init()—>HAL_USART_MspInit() ,先初始化与 MCU无关的串口协议,再初始化与 MCU 相关的串口引脚。
在 STM32 的 HAL 驱动中HAL_PPP_MspInit()作为回调,被HAL_PPP_Init()函数所调用。当我们需要移植程序到 STM32F1平台的时候,我们只需要修改 HAL_PPP_MspInit 函数内容而不需要修改 HAL_PPP_Init 入口参数内容。优点: 可移植性强。
缺点: 增加代码量、增加代码嵌套层级。
同样,MSP函数又可以配合句柄,达到非常强的移植性:
void HAL_UART_MspInit(UART_HandleTypeDef *huart);入口参数仅仅需要一个串口句柄,这样有能看出句柄的方便。
类似于MSP函数,Callback函数主要帮助用户应用层的代码编写。 还是以USART为例,在标准库中,串口触发中断了以后,我们要先在中断中判断是否是接收中断,然后读出数据,顺便清除中断标志位,然后再是对数据的处理,这样如果我们在一个中断函数中写这么多代码,就会显得很混乱:
void USART3_IRQHandler(void) //串口1中断服务程序
{
uint8_t Res;
if(USART_GetITStatus(USART3, USART_IT_RXNE) != RESET) //接收中断(接收到的数据必须是0x0d 0x0a结尾)
{
Res =USART_ReceiveData(USART3); //读取接收到的数据
/*数据处理区*/
}
}
} 而在HAL库中,进入串口中断后,直接由HAL库中断函数进行托管:
void USART1_IRQHandler(void)
{
HAL_UART_IRQHandler(&UART1_Handler); //调用HAL库中断处理公用函数
/***************省略无关代码****************/
}HAL_UART_IRQHandler这个函数完成了判断是哪个中断(接收?发送?或者其他?),然后读出数据,保存至缓存区,顺便清除中断标志位等等操作。 比如我提前设置了,串口每接收五个字节,我就要对这五个字节进行处理。 在一开始我定义了一个串口接收缓存区:
/*HAL库使用的串口接收缓冲,处理逻辑由HAL库控制,接收完这个数组就会调用HAL_UART_RxCpltCallback进行处理这个数组*/
/*RXBUFFERSIZE=5*/
uint8_t aRxBuffer[RXBUFFERSIZE];在初始化中,我在句柄里设置好了缓存区的地址,缓存大小(五个字节)
/*该代码在HAL_UART_Receive_IT函数中,初始化时会引用*/
huart->pRxBuffPtr = pData;//aRxBuffer
huart->RxXferSize = Size;//RXBUFFERSIZE
huart->RxXferCount = Size;//RXBUFFERSIZE则在接收数据中,每接收完五个字节,HAL_UART_IRQHandler才会执行一次Callback函数:
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart);在这个Callback回调函数中,我们只需要对这接收到的五个字节(保存在aRxBuffer[]中)进行处理就好了,完全不用再去手动清除标志位等操作。 所以说Callback函数是一个应用层代码的函数,我们在一开始只设置句柄里面的各个参数,然后就等着HAL库把自己安排好的代码执行完毕就行了。
在 HAL 库中对外设模型进行了统一,支持三种编程方式:
- 轮询模式/阻塞模式
- 中断方式
- DMA模式
以IIC为例,三种编程模式对应的函数如下:
1、轮询模式/阻塞模式
uint8_t HAL_I2C_Master_Transmit();
uint8_t HAL_I2C_Master_Receive();
uint8_t HAL_I2C_Slave_Transmit();
uint8_t HAL_I2C_Slave_Receive();
uint8_t HAL_I2C_Mem_Write();
uint8_t HAL_I2C_Mem_Read();
uint8_t HAL_I2C_IsDeviceReady();2、中断模式
uint8_t HAL_I2C_Master_Transmit_IT();
uint8_t HAL_I2C_Master_Receive_IT();
uint8_t HAL_I2C_Slave_Transmit_IT();
uint8_t HAL_I2C_Slave_Receive_IT();
uint8_t HAL_I2C_Mem_Write_IT();
uint8_t HAL_I2C_Mem_Read_IT();3、DMA模式
uint8_t HAL_I2C_Master_Transmit_DMA();
uint8_t HAL_I2C_Master_Receive_DMA();
uint8_t HAL_I2C_Slave_Transmit_DMA();
uint8_t HAL_I2C_Slave_Receive_DMA();
uint8_t HAL_I2C_Mem_Write_DMA();
uint8_t HAL_I2C_Mem_Read_DMA();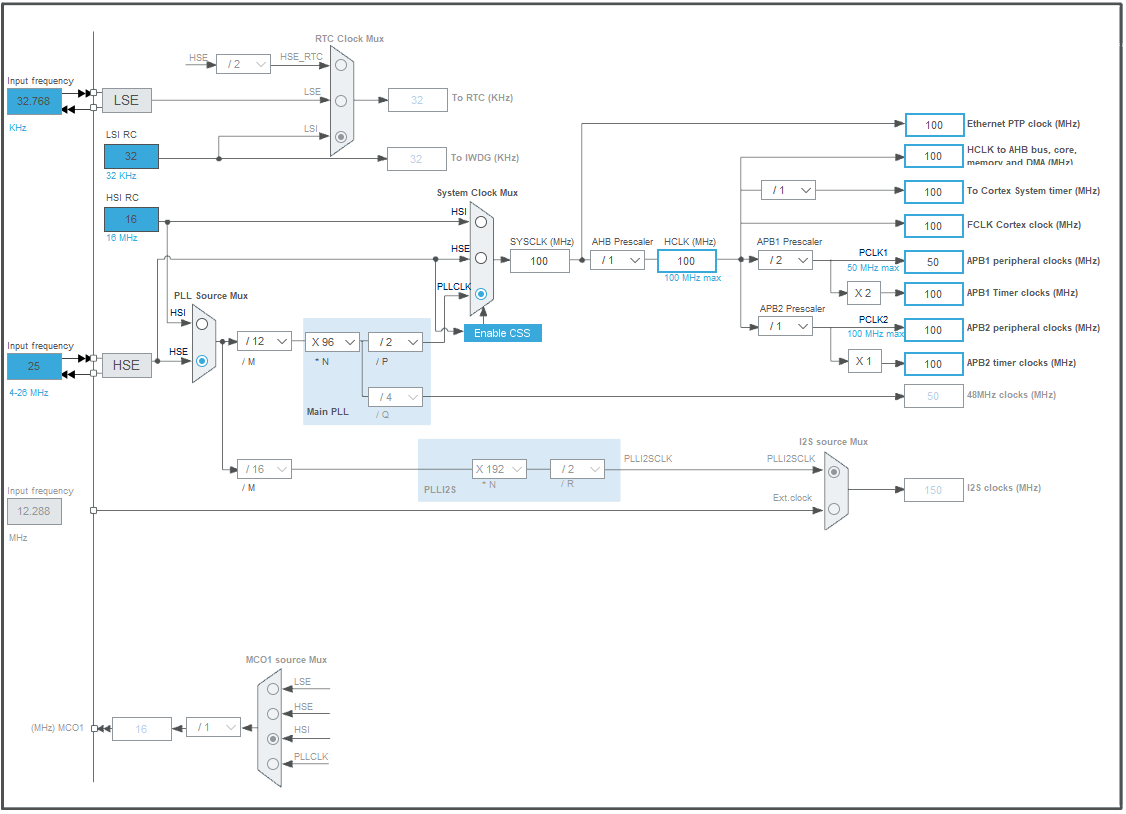
HSE是高速的外部时钟信号,可以由有源晶振或者无源晶振提供,频率从4-26MHZ不等。当使用有源晶振时,时钟从OSC_IN 引脚进入,OSC_OUT引脚悬空,当选用无源晶振时,时钟从OSC_IN和 OSC_OUT进入,并且要配谐振电容。
PLL多路复用器配置
HSE使用的是25M的无源晶振。在设置主PLL时钟的时候,需要设置一系列的分频系数和倍频系数,配置RCC_PLLCFGR寄存器。
#define PLL_M 12
#define PLL_N 96
#define PLL_P 2
#define PLL_Q 4所以我们的主PLL时钟为:
PLL=25/12*96/2=100MHz系统时钟多路复用器配置
系统时钟来源可以是:HSI、PLLCLK、HSE,具体的时钟配置寄存器 RCC_CFGR 的位1-0: SW[1:0] 设置。我们这里设置系统时钟: SYSCLK=PLLCLK= 100MHz。
系统时钟SYSCLK经过AHB预分频器分频之后得到时钟叫APB总线时钟,即 HCLK,分频因子可以是:[1,2,4,8,16,64,128,256,512],具体的由 RCC_CFGR 的位7-4 : HPRE[3:0] 设置。片上大部分外设的时钟都是经过HCLK分频得到,至于AHB总线上的外设的时钟设置为多少,得等到我们使用该外设的时候才设置,我们这里只需粗线条的设置好APB的时钟即可。我们这里设置为1分频,即 HCLK=SYSCLK=100MHz。
APB1总线时钟 PCLK1由HCLK经过低速APB预分频器得到,分频因子可以是:[1,2,4,8,16],具体的由 RCC_CFGR 的位12-10: PRRE1[2:0] 决定。 HCLK1属于低速的总线时钟,最高为 50MHz,片上低速的外设就挂载到这条总线上,至于APB1总线上的外设的时钟设置为多少,得等到我们使用该外设的时候才设置,我们这里只需设置好APB1 的时钟即可。我们这里设置为2分频,即 PCLK1 = HCLK/2= 50MHz。
APB2总线时钟PCLK2由HCLK经过高速APB2预分频器得到,分频因子可以是:[1,2,4,8,16],具体由 RCC_CFGR 的位15-13: PPRE2[2:0] 决定。HCLK2属于高速的总线时钟,片上高速的外设就挂载到这条总线上。至于APB2总线上的外设的时钟设置为多少,得等到我们使用该外设的时候才设置,我们这里只需设置好APB2的时钟即可。我们这里设置为1分频,即 PCLK2= HCLK = 100MHz。