
CARLA, açık kaynaklı bir otonom sürüş simülatörüdür. Otonom sürüş problemiyle ilgili bir dizi görevi ele almak için modüler ve esnek bir API olarak hizmet vermek üzere sıfırdan oluşturuldu. CARLA'nın ana hedeflerinden biri, kullanıcılar tarafından kolayca erişilebilen ve özelleştirilebilen bir araç olarak hizmet veren otonom sürüş Ar-Ge'sini demokratikleştirmeye yardımcı olmaktır. Bunu yapmak için, simülatörün, genel sürüş problemi (örneğin, sürüş politikalarını öğrenmek, eğitim algılama algoritmaları, vb.) Dahilindeki farklı kullanım durumlarının gereksinimlerini karşılaması gerekir. CARLA simülasyonu Unreal Engine üzerine kurulmuştur, yolları ve kentsel ayarları tanımlamak için OpenDRIVE standardını (bugünkü 1.4) kullanır. Simülasyon üzerinde kontrol, proje yaptıkça sürekli büyüyen Python ve C ++ 'da ele alınan bir API aracılığıyla sağlanır.

CARLA simülatörü, ölçeklenebilir bir istemci-sunucu mimarisinden oluşur. Sunucu, simülasyonun kendisiyle ilgili her şeyden sorumludur: sensör oluşturma, fiziğin hesaplanması, dünya durumu ve aktörleri hakkında güncellemeler ve çok daha fazlası. Gerçekçi sonuçları hedeflediğinden, en uygun seçenek, özellikle makine öğrenimi ile uğraşırken sunucuyu özel bir GPU ile çalıştırmak olacaktır. istemci tarafı, sahnedeki aktörlerin mantığını kontrol eden ve dünya koşullarını belirleyen bir dizi müşteri modülünden oluşur. Bu, sunucu ve istemci arasında aracılık eden ve yeni işlevler sağlamak için sürekli gelişen bir katman olan CARLA API'den (Python veya C ++) yararlanılarak elde edilir.

Ubuntu Kurulumu için ilerleyiniz Link
Carla Ubuntu kurulumu için ilerleyiniz link
Cuda geliştirici kiti Ubuntu kurulumu için ilerleyiniz link
Carla Simulatoru Colab üzerinde çalıştırmak için ilerleyiniz link

İstemci, kullanıcının simülasyonda bilgi veya değişiklik istemek için çalıştırdığı modüldür. Bir istemci bir IP ve belirli bir bağlantı noktası ile çalışır. Sunucuyla terminal üzerinden iletişim kurar. Aynı anda çalışan birçok müşteri olabilir. Gelişmiş çok istemci yönetimi, CARLA ve senkronizasyonun tam olarak anlaşılmasını gerektirir.
Dünya, simülasyonu temsil eden bir nesnedir. Oyuncuları ortaya çıkarmak, havayı değiştirmek, dünyanın mevcut durumunu elde etmek vb. İçin ana yöntemleri içeren soyut bir katman görevi görür. Simülasyon başına yalnızca bir dünya vardır. Harita değiştirildiğinde yok edilecek ve yenisiyle değiştirilecektir.
# client oluşturma
# localhost üzerinden 2000 portundan carla simulatore erişilir.
client = carla.Client('localhost', 2000)# İstemci oluşturulduktan sonra zaman aşımını ayarlayın. Bu, tüm ağ işlemlerini sınırlar, böylece bunlar istemciyi sonsuza kadar engellemez. Bağlantı başarısız olursa bir hata döndürülür.
client.set_timeout(10.0) # seconds# Dünya bağlantısı, world adlı degisken kullanılır.
world = client.get_world()# mevcut haritaları listeleyip, o haritayı yükleyebilirsiniz.
print(client.get_available_maps())
world = client.load_world('Town01')Hava
Hava durumu tek başına bir sınıf değil, dünyadan erişilebilen bir dizi parametredir. Parametrizasyon, güneş yönü, bulutluluk, rüzgar, sis ve çok daha fazlasını içerir. Carla.WeatherParameters yardımcı sınıfı, özel bir hava durumunu tanımlamak için kullanılır.
weather = carla.WeatherParameters(
cloudiness=80.0,
precipitation=30.0,
sun_altitude_angle=70.0)
world.set_weather(weather)
print(world.get_weather())Doğrudan dünyaya uygulanabilecek bazı hava durumu ön ayarları vardır. Bunlar carla.WeatherParameters içinde listelenir ve bir enum olarak erişilebilir.
world.set_weather(carla.WeatherParameters.WetCloudySunset)Hata ayıklama
World nesneleri, genel bir öznitelik olarak carla.DebugHelper nesnesine sahiptir. Simülasyon sırasında farklı şekillerin çizilmesine izin verir. Bunlar meydana gelen olayları izlemek için kullanılır. Aşağıdaki örnek, bir oyuncunun konumuna ve dönüşüne kırmızı bir kutu çizer.
debug = world.debug
debug.draw_box(carla.BoundingBox(actor_snapshot.get_transform().location,carla.Vector3D(0.5,0.5,2)),actor_snapshot.get_transform().rotation, 0.05, carla.Color(255,0,0,0),0)Dünya anlık görüntüleri
Simülasyondaki her oyuncunun durumunu tek bir karede içerir. Bir zaman referansı ile dünyanın bir tür hareketsiz görüntüsü. Bilgi, asenkron modda bile aynı simülasyon adımından gelir.
# Retrieve a snapshot of the world at current frame.
world_snapshot = world.get_snapshot()Bir aktör, simülasyonda rol oynayan her şeydir.
Araçlar.
Yürüyüşçüler.
Sensörler.
Seyirci.
Trafik işaretleri ve trafik ışıkları.
Taslaklar, bir aktör yaratmak için gerekli olan önceden hazırlanmış aktör düzenleridir. Temel olarak, animasyonlara ve bir dizi özelliğe sahip modeller. Bu özelliklerden bazıları kullanıcı tarafından özelleştirilebilir, bazıları özelleştirilmez. Mevcut tüm planları ve bunlarla ilgili bilgileri içeren bir Taslak kitaplığı vardır.
Carla.BlueprintLibrary sınıfı, carla.ActorBlueprint öğelerinin bir listesini içerir. Ona erişimi sağlayabilen dünya nesnesidir.
blueprint_library = world.get_blueprint_library()Taslakların onları tanımlamak için bir kimliği vardır ve aktörler onunla birlikte ortaya çıkar. Kitaplık, belirli bir kimliği bulmak, rastgele bir plan seçmek veya sonuçları bir joker karakter kalıbı kullanarak filtrelemek için okunabilir.
# Belirli bir plan bulun.
collision_sensor_bp = blueprint_library.find('sensor.other.collision')
# Rastgele bir araç planı seçin.
vehicle_bp = random.choice(blueprint_library.filter('vehicle.*.*'))Bunun yanı sıra, her carla.ActorBlueprint, alınıp ayarlanabilen bir carla.ActorAttribute serisine sahiptir.
is_bike = [vehicle.get_attribute('number_of_wheels') == 2]
if(is_bike)
vehicle.set_attribute('color', '255,0,0')Spawning
Dünya nesnesi, oyuncuları yetiştirmekten ve bunların takibinden sorumludur. Spawning yalnızca bir plan ve oyuncu için bir konum ve dönüş belirten bir carla.Transform gerektirir.
Oyuncu yetiştirmek için dünyanın iki farklı yöntemi vardır.
spawn_actor() Spawning başarısız olursa bir istisna yaratır. try_spawn_actor() Spawning başarısız olursa None döndürür.
transform = Transform(Location(x=230, y=195, z=40), Rotation(yaw=180))
actor = world.spawn_actor(blueprint, transform)Oyuncu, belirtilen konumda çarpışma durumunda ortaya çıkmayacaktır. Bunun statik bir nesneyle veya başka bir oyuncuyla olması farketmez. Bu istenmeyen Spawning çarpışmalarından kaçınmayı denemek mümkündür.
# araçlar için. Önerilen Spawning noktalarının bir listesini döndürür.
spawn_points = world.get_map().get_spawn_points()yürüyüşçüler için world.get_random_location (). Kaldırımda rastgele bir nokta verir. Aynı yöntem, yürüyüşçüler için bir hedef konumu belirlemek için kullanılır.
spawn_point = carla.Transform()
spawn_point.location = world.get_random_location_from_navigation()Harita, simüle edilmiş dünyayı, çoğunlukla şehri temsil eden nesnedir. Mevcut sekiz harita var. Hepsi yolları açıklamak için OpenDRIVE 1.4 standardını kullanıyor.
Yollar, şeritler ve kavşaklar, istemciden erişilmek üzere Python API tarafından yönetilir. Bunlar, araçlara bir navigasyon yolu sağlamak için ara nokta sınıfı ile birlikte kullanılır.
Trafik işaretlerine ve trafik ışıklarına, OpenDRIVE tanımları hakkında bilgi içeren carla.Landmark nesneleri olarak erişilebilir. Ek olarak, simülatör, OpenDRIVE dosyasındaki bilgileri kullanarak çalışırken otomatik olarak durur, verim ve trafik ışığı nesneleri oluşturur. Bunların yola yerleştirilmiş sınırlayıcı kutuları vardır. Araçlar, sınır kutularına girdiklerinde onlardan haberdar olurlar.
Varsayılan olarak gelene haritalar
| Kasaba Özeti | Özet |
|---|---|
| Town01 | Tüm "T kavşakları" ile temel bir şehir düzeni. |
| Town02 | Town01'e benzer, ancak daha küçük. |
| Town03 | 5 şeritli bir kavşak, döner kavşak, düzensizlik, tünel ve çok daha fazlasıyla en karmaşık kasaba. |
| Town04 | Bir otoyol ve küçük bir kasaba ile sonsuz bir döngü. |
| Town05 | Kavşakları ve köprüsü olan kare şeklinde şehir. Yön başına birden fazla şeridi vardır. Şerit değişiklikleri yapmak için kullanışlıdır. |
| Town06 | Birçok otoyol girişi ve çıkışı olan uzun otoyollar. Aynı zamanda bir Michigan solu da var. |
| Town07 | Dar yolları, neredeyse hiç olmayan trafik ışıkları ve ahırları olan kırsal bir ortam. |
| Town08 | Cadde veya gezinti yeri gibi farklı ortamlara ve daha gerçekçi dokulara sahip bir şehir ortamı. |

Sensörler bir olayın gerçekleşmesini bekler ve ardından simülasyondan veri toplar. Verilerin nasıl yönetileceğini tanımlayan bir fonksiyon çağırırlar. Sensör, bir ana araca bağlı bir aktördür. Etrafındaki aracı takip ederek çevrenin bilgilerini toplar. Mevcut sensörler, Taslak kitaplığındaki planlarına göre tanımlanır.
Kameralar (RGB, derinlik ve anlamsal bölümleme).
Çarpışma detektörü.
Gnss sensörü.
IMU sensörü.
Lidar raycast.
Şerit istilası dedektörü.
Engel detektörü.
Radar.
RSS.
Sensörler adım adım
Carla.Sensor sınıfı, verileri ölçebilen ve aktarabilen özel bir aktör türünü tanımlar.
Bu veriler nedir? Sensör tipine bağlı olarak çok değişir. Tüm veri türleri genel carla.SensorData'dan miras alınır.
Verileri ne zaman alırlar? Ya her simülasyon adımında ya da belirli bir olay kaydedildiğinde. Sensör tipine bağlıdır. Her sensörün verileri almak ve yönetmek için bir listen () yöntemi vardır.
Ayarlar
Diğer tüm oyuncularda olduğu gibi, planı bulun ve belirli nitelikler belirleyin. Sensörleri kullanırken bu çok önemlidir. Nitelikleri, elde edilen sonuçları belirleyecektir. Bunlar sensör referansında ayrıntılı olarak açıklanmıştır.
Aşağıdaki örnek, bir kontrol paneli HD kamerasını ayarlar.
# Sensörün planını bulun.
blueprint = world.get_blueprint_library().find('sensor.camera.rgb')
# Görüntü çözünürlüğünü ve görüş alanını ayarlamak için planın niteliklerini değiştirin.
blueprint.set_attribute('image_size_x', '1920')
blueprint.set_attribute('image_size_y', '1080')
blueprint.set_attribute('fov', '110')
# Sensör yakalamaları arasındaki süreyi saniye cinsinden ayarlayın
blueprint.set_attribute('sensor_tick', '0.2')Dinleme
Her sensörün bir listen () yöntemi vardır. Bu, sensör her veri aldığında çağrılır. Argüman geri çağrısı bir lambda işlevidir. Veriler alındığında sensörün ne yapması gerektiğini açıklar.
# do_something(), kamera tarafından her yeni görüntü oluşturulduğunda çağrılacaktır.
sensor.listen(lambda data: do_something(data))
...
# Bu çarpışma sensörü, her çarpışma algılandığında yazdıracaktır.
def callback(event):
for actor_id in event:
vehicle = world_ref().get_actor(actor_id)
print('Vehicle too close: %s' % vehicle.type_id)
sensor02.listen(callback)- Sensör türleri
Kameralar
Onların bakış açısından dünyanın bir fotoğrafını çekin. Yardımcı sınıf carla.ColorConverter, söz konusu görüntüyü farklı bilgileri temsil edecek şekilde değiştirecektir.
| Sensör | Çıktı | Açıklama |
|---|---|---|
| Depth | carla.Image | Gri ölçekli bir haritada görüş alanındaki öğelerin derinliğini işler. |
| RGB | carla.Image | Çevrenin net görüşünü sağlar. Sahnenin normal bir fotoğrafına benziyor. |
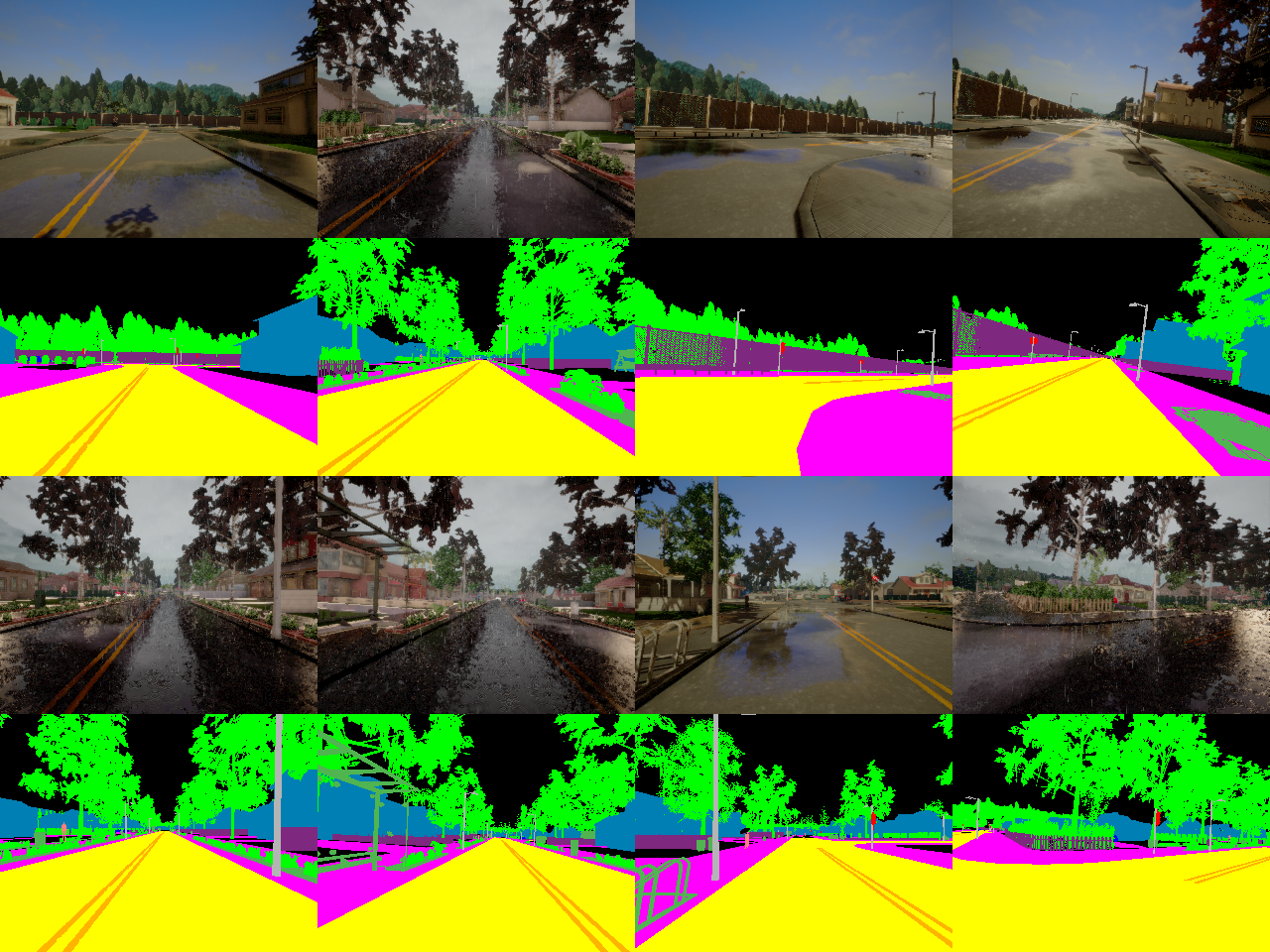
| Semantic segmentation | carla.Image | Görünüm alanındaki öğeleri etiketlerine göre belirli bir renkle işler. |
depth sensor

RGB sensor

Semantic segmentation sensor
Dedektörler
Eklendikleri nesne belirli bir olayı kaydettiğinde verileri alın. Tetiklendiğinde verileri alın.
| Sensör | Çıktı | Açıklama |
|---|---|---|
| Collision | carla.CollisionEvent | Ebeveyni ve diğer oyuncular arasındaki çatışmaları alır. |
| Lane invasion | carla.LaneInvasionEvent | Ebeveyni bir şerit işaretini geçtiğinde kaydolur. |
Diğer
Navigasyon, fiziksel özelliklerin ölçümü ve sahnenin 2D / 3D nokta haritaları gibi farklı işlevler.
| Sensör | Çıktı | Açıklama |
|---|---|---|
| GNSS | carla.GNSSMeasurement | Sensörün coğrafi konumunu alır. |
| IMU | carla.IMUMeasurement | Bir ivmeölçer, bir jiroskop ve bir pusuladan oluşur. |
| LIDAR | carla.LidarMeasurement | Dönen bir LIDAR. Çevreyi modellemek için her nokta için koordinatları ve yoğunluğu olan bir 4D nokta bulutu oluşturur. |
| Radar | carla.RadarMeasurement | Görünürde 2B nokta harita modelleme öğeleri ve sensörle ilgili hareketleri. |
| RSS | carla.RssResponse | Bir araca uygulanan denetleyiciyi güvenlik kontrollerine göre değiştirir. Bu sensör diğerlerinden farklı bir şekilde çalışır ve bunun için özel RSS dokümantasyonu vardır. |
| Semantic LIDAR | carla.SemanticLidarMeasurement | Dönen bir LIDAR. Örnek ve anlamsal segmentasyonla ilgili ekstra bilgiler içeren bir 3B nokta bulutu oluşturur. |
Lidar
Radar

RSS

Semantic LIDAR
Simulatoru server olarak ayağa kaldırma
Terminalden aşağıdaki kodu çalıştırınız, böylece Carla server olarak çalışacak ve dışardan bağlanma imkanı sunacak.
$ ./CarlaUE4.sh -carla-server
Diğer terminal çalışırken kapatmadan yeni bir terminal daha açınız, bu terminalde ise aşağıdaki kodu çalıştırınız.
$ export CARLA_SERVER=/mnt/EE6A1EE26A1EA6FD/Python/Carla/CarlaUE4.sh
son açtığınız terminalden aşağıdaki kodu çalıştırınız
$ python3 client_example.py --autopilot
Artık carla simulatore Python ile bağlandık, açtığımız simulator girdiğimiz argümana göre yani otonom olarak ilerleyecektir.
untitled.mp4
Code
#!/usr/bin/env python3
# Copyright (c) 2017 Computer Vision Center (CVC) at the Universitat Autonoma de
# Barcelona (UAB).
#
# This work is licensed under the terms of the MIT license.
# For a copy, see <https://opensource.org/licenses/MIT>.
"""Basic CARLA client example."""
from __future__ import print_function
import argparse
import logging
import random
import time
from carla.client import make_carla_client
from carla.sensor import Camera, Lidar
from carla.settings import CarlaSettings
from carla.tcp import TCPConnectionError
from carla.util import print_over_same_line
def run_carla_client(args):
# Here we will run 3 episodes with 300 frames each.
number_of_episodes = 3
frames_per_episode = 300
# We assume the CARLA server is already waiting for a client to connect at
# host:port. To create a connection we can use the `make_carla_client`
# context manager, it creates a CARLA client object and starts the
# connection. It will throw an exception if something goes wrong. The
# context manager makes sure the connection is always cleaned up on exit.
with make_carla_client(args.host, args.port) as client:
print('CarlaClient connected')
for episode in range(0, number_of_episodes):
# Start a new episode.
if args.settings_filepath is None:
# Create a CarlaSettings object. This object is a wrapper around
# the CarlaSettings.ini file. Here we set the configuration we
# want for the new episode.
settings = CarlaSettings()
settings.set(
SynchronousMode=True,
SendNonPlayerAgentsInfo=True,
NumberOfVehicles=20,
NumberOfPedestrians=40,
WeatherId=random.choice([1, 3, 7, 8, 14]),
QualityLevel=args.quality_level)
settings.randomize_seeds()
# Now we want to add a couple of cameras to the player vehicle.
# We will collect the images produced by these cameras every
# frame.
# The default camera captures RGB images of the scene.
camera0 = Camera('CameraRGB')
# Set image resolution in pixels.
camera0.set_image_size(800, 600)
# Set its position relative to the car in meters.
camera0.set_position(0.30, 0, 1.30)
settings.add_sensor(camera0)
lidar = Lidar('Lidar32')
lidar.set_position(0, 0, 2.50)
lidar.set_rotation(0, 0, 0)
lidar.set(
Channels=32,
Range=50,
PointsPerSecond=100000,
RotationFrequency=10,
UpperFovLimit=10,
LowerFovLimit=-30)
settings.add_sensor(lidar)
else:
# Alternatively, we can load these settings from a file.
with open(args.settings_filepath, 'r') as fp:
settings = fp.read()
# Now we load these settings into the server. The server replies
# with a scene description containing the available start spots for
# the player. Here we can provide a CarlaSettings object or a
# CarlaSettings.ini file as string.
scene = client.load_settings(settings)
# Choose one player start at random.
number_of_player_starts = len(scene.player_start_spots)
player_start = random.randint(0, max(0, number_of_player_starts - 1))
# Notify the server that we want to start the episode at the
# player_start index. This function blocks until the server is ready
# to start the episode.
print('Starting new episode...')
client.start_episode(player_start)
# Iterate every frame in the episode.
for frame in range(0, frames_per_episode):
# Read the data produced by the server this frame.
measurements, sensor_data = client.read_data()
# Print some of the measurements.
print_measurements(measurements)
# Save the images to disk if requested.
if args.save_images_to_disk:
for name, measurement in sensor_data.items():
filename = args.out_filename_format.format(episode, name, frame)
measurement.save_to_disk(filename)
# We can access the encoded data of a given image as numpy
# array using its "data" property. For instance, to get the
# depth value (normalized) at pixel X, Y
#
# depth_array = sensor_data['CameraDepth'].data
# value_at_pixel = depth_array[Y, X]
#
# Now we have to send the instructions to control the vehicle.
# If we are in synchronous mode the server will pause the
# simulation until we send this control.
if not args.autopilot:
client.send_control(
steer=random.uniform(-1.0, 1.0),
throttle=0.5,
brake=0.0,
hand_brake=False,
reverse=False)
else:
# Together with the measurements, the server has sent the
# control that the in-game autopilot would do this frame. We
# can enable autopilot by sending back this control to the
# server. We can modify it if wanted, here for instance we
# will add some noise to the steer.
control = measurements.player_measurements.autopilot_control
control.steer += random.uniform(-0.1, 0.1)
client.send_control(control)
def print_measurements(measurements):
number_of_agents = len(measurements.non_player_agents)
player_measurements = measurements.player_measurements
message = ""
message = message.format(
pos_x=player_measurements.transform.location.x,
pos_y=player_measurements.transform.location.y,
speed=player_measurements.forward_speed * 3.6, # m/s -> km/h
col_cars=player_measurements.collision_vehicles,
col_ped=player_measurements.collision_pedestrians,
col_other=player_measurements.collision_other,
other_lane=100 * player_measurements.intersection_otherlane,
offroad=100 * player_measurements.intersection_offroad,
agents_num=number_of_agents)
print_over_same_line(message)
def main():
argparser = argparse.ArgumentParser(description=__doc__)
argparser.add_argument(
'-v', '--verbose',
action='store_true',
dest='debug',
help='print debug information')
argparser.add_argument(
'--host',
metavar='H',
default='localhost',
help='IP of the host server (default: localhost)')
argparser.add_argument(
'-p', '--port',
metavar='P',
default=2000,
type=int,
help='TCP port to listen to (default: 2000)')
argparser.add_argument(
'-a', '--autopilot',
action='store_true',
help='enable autopilot')
argparser.add_argument(
'-l', '--lidar',
action='store_true',
help='enable Lidar')
argparser.add_argument(
'-q', '--quality-level',
choices=['Low', 'Epic'],
type=lambda s: s.title(),
default='Epic',
help='graphics quality level, a lower level makes the simulation run considerably faster.')
argparser.add_argument(
'-i', '--images-to-disk',
action='store_true',
dest='save_images_to_disk',
help='save images (and Lidar data if active) to disk')
argparser.add_argument(
'-c', '--carla-settings',
metavar='PATH',
dest='settings_filepath',
default=None,
help='Path to a "CarlaSettings.ini" file')
args = argparser.parse_args()
log_level = logging.DEBUG if args.debug else logging.INFO
logging.basicConfig(format='%(levelname)s: %(message)s', level=log_level)
logging.info('listening to server %s:%s', args.host, args.port)
args.out_filename_format = '_out/episode_{:0>4d}/{:s}/{:0>6d}'
while True:
try:
run_carla_client(args)
print('Done.')
return
except TCPConnectionError as error:
logging.error(error)
time.sleep(1)
if __name__ == '__main__':
try:
main()
except KeyboardInterrupt:
print('\nCancelled by user. Bye!')